機械手臂旋轉矩陣的問題,透過圖書和論文來找解法和答案更準確安心。 我們找到下列免費下載的地點或者是各式教學
機械手臂旋轉矩陣的問題,我們搜遍了碩博士論文和台灣出版的書籍,推薦趙英傑寫的 超圖解 Python 物聯網實作入門:使用 ESP8266 與 MicroPython 和(美)顧友諒的 機器人與數字人:基於MATLAB的建模與控制都 可以從中找到所需的評價。
這兩本書分別來自旗標 和機械工業所出版 。
國立臺灣科技大學 機械工程系 林清安所指導 賴以衛的 以3D深度學習及點雲匹配技術進行機械手臂自動化複雜零件分類 (2021),提出機械手臂旋轉矩陣關鍵因素是什麼,來自於3D CAD、點資料處理、深度學習、隨機取放、機械手臂。
而第二篇論文萬能科技大學 電資研究所 江義淵所指導 楊懋鴻的 基於機器人作業系統(ROS)之自主移動式多關節機器人之研究 (2021),提出因為有 機械手臂、機器人作業系統、自主移動的重點而找出了 機械手臂旋轉矩陣的解答。
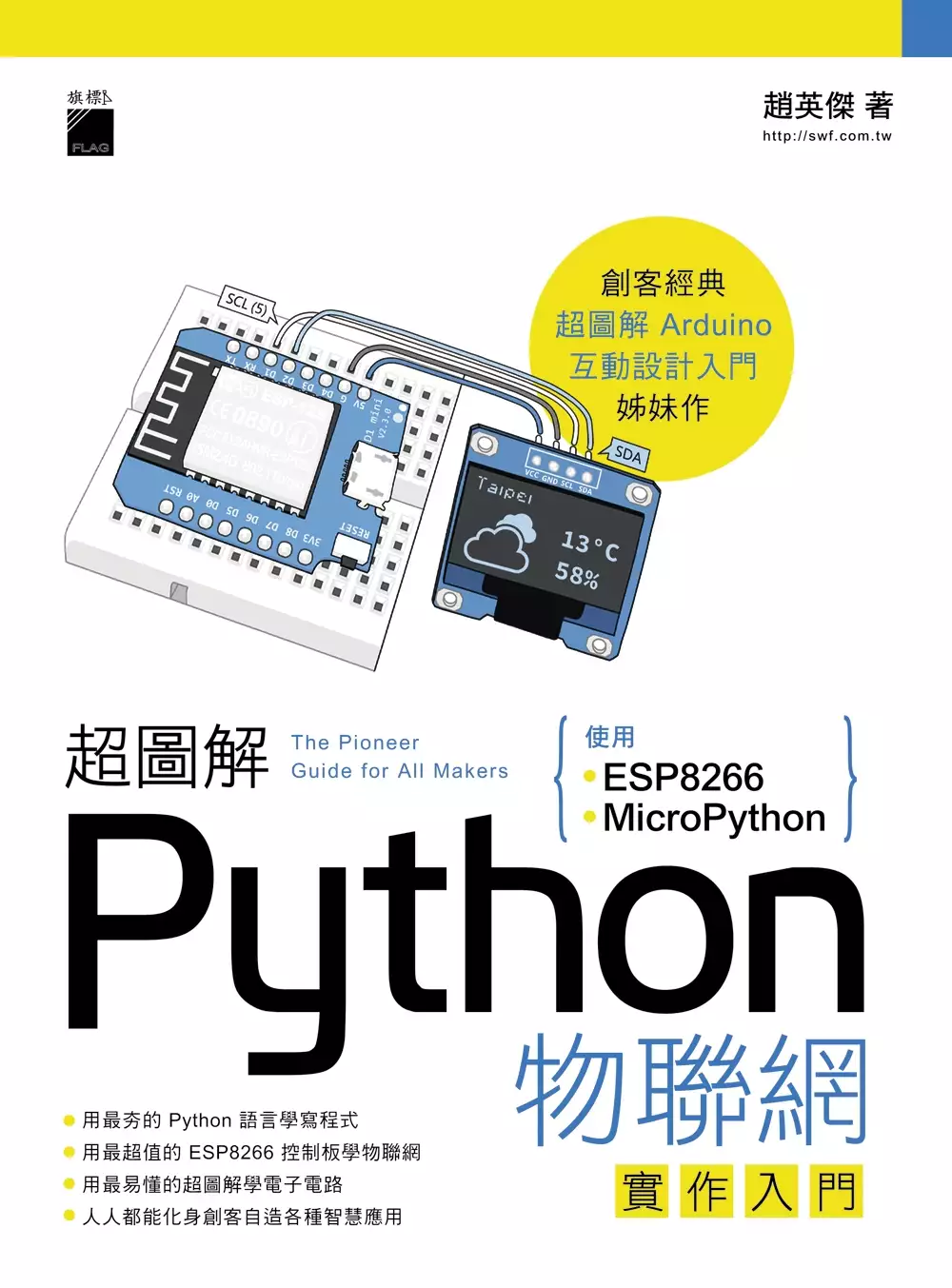
超圖解 Python 物聯網實作入門:使用 ESP8266 與 MicroPython
為了解決機械手臂旋轉矩陣 的問題,作者趙英傑 這樣論述:
本書是創客教學經典《超圖解 Arduino 互動設計入門》的姊妹作。是一本結合 Python 語言、電子電路、微電腦控制和物聯網相關技術的入門書。 Python 無疑是近年最受注目的通用型程式語言。它的語法簡單易學。不僅智慧型手機、個人電腦到網路雲端應用平台都支援 Python 程式。應用領域更遍及系統工具、網路程式、數值分析到人工智慧。而開放原始碼的 MicroPython 專案。更讓 Python 程式可以在拇指大小的微電腦控制器上執行。直接控制硬體或開發物聯網專案。就連歐洲太空總署也將 MicroPython 應用在控制太空載具上。MicroPython 支
援多種 32 位元控制板。本書採用的是內建 Wi-Fi 無線網路、創客一致公認價美物廉 C/P 值超高的 ESP8266 系列控制板。 本書的目標是讓沒有電子電路基礎。對微電腦、電子 DIY 及物聯網有興趣的人士。也能輕鬆閱讀、認識 Python 語言。進而順利使用 Python 與 ESP8266 控制板完成互動應用。因此。實驗用到的電子、電路組裝和 Python 程式觀念。皆以手繪圖解的方式說明。為了方便讀者進行實驗。書本裡的電路都採用現成的模組。並搭配圖解說明。讓讀者不單只會照著接線。也能理解電子模組背後的原理。進而能靈活改造應用並實踐自己的想法。 本書範例豐富多元。包括自動
吃錢幣存錢筒、雷射槍玩具標靶、電流急急棒遊戲、拍手聲音感應開關、GPS 軌跡追蹤、遠端手機遙控家電、遠端遙控電子調光器、物聯網雲端資訊儀表板、MQTT 即時氣象資訊推送系統等等。既能學習各項技術。又可創造實用有趣的成果。 本書特色 □ 用最夯的 Python 語言學寫程式 □ 用最超值的 ESP8266 控制板學物聯網 □ 用最易懂的超圖解學電子電路 □ 人人都能化身創客自造各種智慧應用
以3D深度學習及點雲匹配技術進行機械手臂自動化複雜零件分類
為了解決機械手臂旋轉矩陣 的問題,作者賴以衛 這樣論述:
以機械手臂進行零件分類是自動化生產線的主要工作之一,利用結構光掃描器搭配AI深度學習及點雲匹配技術,可快速辨識產線上各個零件的類型,並自動計算每個零件的拾取資訊,然而,隨著零件類型、數量及幾何複雜度的提升,深度學習的數據準備作業將耗費大量時間,且以越複雜的零件進行點雲匹配時,其匹配的誤差也會隨之增加。為克服此等問題,本論文以點資料處理技術對零件的點雲進行處理,改善數據準備耗時及點雲匹配誤差的問題,據以開發一套「複雜零件隨機夾取/分類系統」,達到自動化零件分類之目的。本論文透過對零件之掃描點雲進行一系列濾波、分割及資料集擴增處理,由少量掃描點雲自動化產生大量點雲資料集,藉以進行深度學習的訓練,
於自動化作業現場快速判別零件種類;接著以RANSAC搭配ICP法進行零件的3D CAD模型與其掃描點雲的精準匹配,將事先分析CAD模型所產生的夾取資訊轉換為零件實際擺放的夾取資訊,並依零件辨識結果及其座標轉換,以機械手臂完成零件的夾取與分類。本論文除了詳述如何以點資料處理技術建構深度學習辨識模型及達到點雲之精準匹配,也簡述如何以3D CAD模型求取零件夾取資訊,最終以多種不同幾何特性的複雜零件驗證所提方法的可行性及所開發系統的實用性。
機器人與數字人:基於MATLAB的建模與控制

為了解決機械手臂旋轉矩陣 的問題,作者(美)顧友諒 這樣論述:
本書提供了一系列多元且實用的工具,可用於復雜機器人系統的建模和控制,以及數字人的建模和運動生成。書中首先介紹機器人運動學的數學原理和控制系統設計,然后將機器人算法和建模過程向更高維度、更大規模和更復雜的研究領域——數字人建模——推進。全書包含大量MATLAB代碼和可視化圖形示例,讀者可跟隨講解內容在MATLAB中創建3D機器人模型和數字人模型,並通過實時動畫操作模型。本書適合機器人相關工程類專業的高年級本科生和研究生學習,同時也可作為機器人和數字人研發者及工程師的參考指南。博士畢業於普度大學電子工程專業(1985),碩士畢業於中國科學技術大學電子專業(1981)。現為美國奧克蘭大學電子與計算機
工程系教授,研究領域包括機器人動力學、機器人系統控制、非線性建模和仿真以及數字人體建模、運動生成和可視化,發表學術論文80余篇。曾任職於通用汽車研發中心(1991~1999);曾擔任克萊斯勒汽車公司「高級制造工程」(AME)項目顧問(1996~2008),2001年6月,其開發的用於動力提升設備的動態控制算法獲得美國專利(美國6204619 B1)。 譯者序前言第1章 機器人和數字人建模概述1.1機器人的發展歷程:過去、現在和未來1.2數字人建模:歷史、成就和新挑戰1.3借助機器人分析方法進行數字人建模參考文獻第2章 數學基礎2.1向量、坐標變換和空間描述2.2李群和李代數
2.3指數映射和k—φ過程2.4對偶數、對偶向量及代數形式2.4.1對偶環微積分2.4.2對偶向量和對偶矩陣2.4.3單位旋量和特殊正交對偶矩陣2.5外代數簡介習題參考文獻第3章 剛體運動的表示3.1平移和旋轉3.2線速度和角速度3.3位置和方向的統一表示3.4切空間和雅可比矩陣變換習題參考文獻第4章 機器人運動學和靜力學4.1D—H法4.2剛體運動的齊次變換4.3運動學反解4.4雅可比矩陣和微分運動4.5對偶變換4.6機器人靜力學4.7計算機仿真實踐4.7.1斯坦福機器人運動4.7.2工業機器人模型及其運動習題參考文獻第5章 冗余機器人和混聯機器人系統5.1廣義逆矩陣5.2冗余機器人5.3混
聯機器人系統5.4並聯機構的運動學建模5.4.1Stewart平台5.4.2雅可比方程和對偶原理5.4.33+3自由度混聯機器人手臂建模和分析5.5計算機仿真實踐習題參考文獻第7章 機器人動力學:建模和方程7.1機器人動力學的幾何解釋7.2牛頓—歐拉算法7.3拉格朗日方程7.4慣性矩陣的確定7.5位形流形和等距嵌入7.5.1度量分解和流形嵌入7.5.2位形流形的等距嵌入7.5.3組合等距嵌入和結構矩陣7.5.4最小等距嵌入和等距化7.6簡潔動力學方程習題參考文獻第8章 機器人系統控制8.1路徑規划和軌跡跟蹤8.2獨立關節伺服控制8.3輸入/輸出映射和系統可逆性8.3.1輸入/輸出映射和相對度的
概念8.3.2系統的可逆性及應用8.4精確線性化和可線性化理論8.4.1對合性和完全可積性8.4.2輸入狀態線性化過程8.4.3輸入/輸出線性化過程8.4.4輸入/輸出通道的動態擴展8.4.5線性子系統和內部動態8.4.6零動態和最小相位系統8.5機器人系統動態控制8.5.1李雅普諾夫穩定性理論8.5.2設定點穩定性和軌跡跟蹤控制策略8.6多級聯系統反推控制器設計8.6.1李雅普諾夫直接法控制器設計8.6.2反推遞推法控制器設計8.7機器人自適應控制系統8.8計算機仿真實踐8.8.13關節類斯坦福機器人手臂動力學建模和控制8.8.2欠驅動機器人系統建模和控制8.8.3並聯機器人動力學建模和控制
習題參考文獻第9章 數字人建模:運動學和靜力學9.1局部與全局運動學模型和運動類型9.2五點模型的局部和全局雅可比矩陣9.3運動范圍和力的范圍9.3.1人體結構體系基本概念9.3.2人體運動系統概述9.3.3運動范圍和關節舒適區9.3.4關節力的范圍9.4數字人靜力學9.4.1關節力矩分布和平衡法則9.4.2由重力產生的關節力矩分布9.5姿態優化准則9.5.1關節舒適准則9.5.2對接關節力矩分布准則9.5.3最小做功的目標習題參考文獻第10章 數字人建模:三維實體模型和運動生成10.1利用MATLAB建立人體模型10.2手部模型和數字傳感10.3運動規划和定量描述10.4人體基本運動分析:行
走、奔跑和跳躍10.5數字人現實運動生成習題參考文獻第11章 數字人建模:動力學和交互式控制11.1動力學模型、算法及實現11.2δ力激勵和步態動力學11.3模擬汽車碰撞中的數字人動力學運動11.4簡易爆炸裝置中的人體模型動力學建模和分析11.5車輛主動系統的動態交互式控制11.5.1車輛主動約束系統建模和控制11.5.2主動懸掛系統模型和人機交互控制11.6數字人建模展望習題參考文獻索引 譯者序A Journey from Robot to Digital Human: Mathematical Principles and Applications with MATLA
B Programming機器人技術及其應用目前已經從傳統的工業自動化領域發展到國民經濟的各個領域、各行各業,最近幾年,醫療機器人、康復機器人、仿人機器人、運動機器人等更是得到了迅猛的發展。這些機器人都與人體本身密切相關,是機器人學與醫學、生物學、仿生學等學科的進一步融合,並將徹底改變人們的日常生活模式。
基於機器人作業系統(ROS)之自主移動式多關節機器人之研究
為了解決機械手臂旋轉矩陣 的問題,作者楊懋鴻 這樣論述:
由於過往機器人的研發,從初階硬體設計到零組件的開發、組裝,軟體控制程式的撰寫,這過程中存在著許多不確定的變數,故從設計到樣品需反覆測試與修正,以致研發期程漫長,研發成本不斐,且因系統架構封閉,不利於後續的修改,使得機器人大多只能侷限運用在工廠、實驗室等場所,不易於廣泛的應用。本論文的研究內容為,如何運用機器人作業系統(Robot Operating System,ROS)及網路社群豐富的資源,整合感測、電子、電機等技術,藉由GAZEBO3D環境模擬,模擬開發出具有自主移動能力之機械手臂,來驗證ROS系統對於機器人的開發,能夠有效地縮短期程,降低成本。本研究利用安裝於載台上的相機擷取圖像,透過
計算分析,判斷目標物與機器人的相對位置,以驅動載台上輪子轉動,使載台能朝向目標物前進。當載台到達目標物前時,利用載台上的機械手臂夾取目標物,放置預設的位置,完成工作。在這一連串看似簡單的動作中,實際上需要整合影像分析、逆向運動學、軌跡規劃等理論及演算法。藉由ROS系統的架構,及相關函式庫的運用,能將各冗長且複雜的計算過程加以簡化,加上ROS系統在各節點間的通訊管理,能讓各獨立功能相互配合,以整合成一套智慧系統。